No.161215
(Re:161218) |
KD-06, obstacle avoidance Robot, with Arduino & XBee S2
|
〔概要-1〕
障害物回避ロボを作成し、人生に立ちはだかる諸々の困難を回避する
〔概要-2〕
回避ロボは2つのモードで制御する
1) 無線リモコンによる有人制御
2) プログラムによる無人制御
|
〔参考書籍〕
『XbeeによるArduino無線ロボット工作』 鈴木美朗志 著 (2016年 東京電機大学出版局)
第2章 XBeeによるインセクト(虫型ロボット)の制御
|
〔参考LINK〕
Arduino Leonardo と xBee のトラブル : 林檎愛博士-私は如何にしてMacを愛するようになったか
センサーを使ってみよう(PSD測距センサー編) | RT Robot Shop Blog
光位置センサ PSD- Wikipedia
PORTD
C言語での無限ループの作り方
繰り返し文
十六進法 - Wikipedia
2進数、16進数と10進数 - CyberLibrarian
|
〔Parts List〕
Arduino UNO R3
XBee S2 (ZB 2mW, XB24-Z7PIT-004 ) PCBアンテナ
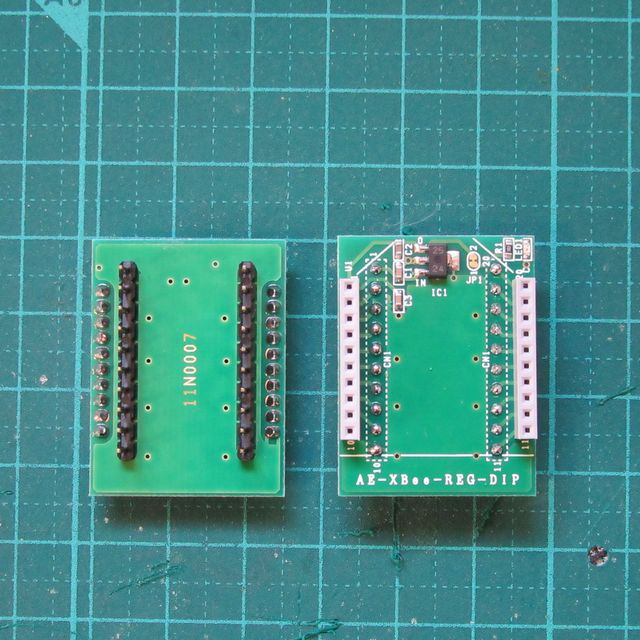
XBee ピッチ変換基盤 3.3v レギュレータなし
XBee ピッチ変換基盤 3.3v レギュレータ付き
タミヤ リモコンインセクト ロボクラフトシリーズ7
タミヤ ユニバーサルプレート
2Pトグルスイッチ
抵抗390Ω
抵抗10KΩ
電池ボックス 単三x3本用(スナップ仕様) x3
電池ボックス 006P
電池スナップ
ユニバーサル基盤 (Arduinoシールド用)
DCジャック・プラグ
LED
タクトスイッチ
積層セラミックコンデンサ 0.1μ㌲ 50V
積層セラミックコンデンサ 0.01μ㌲ 50V
|
|

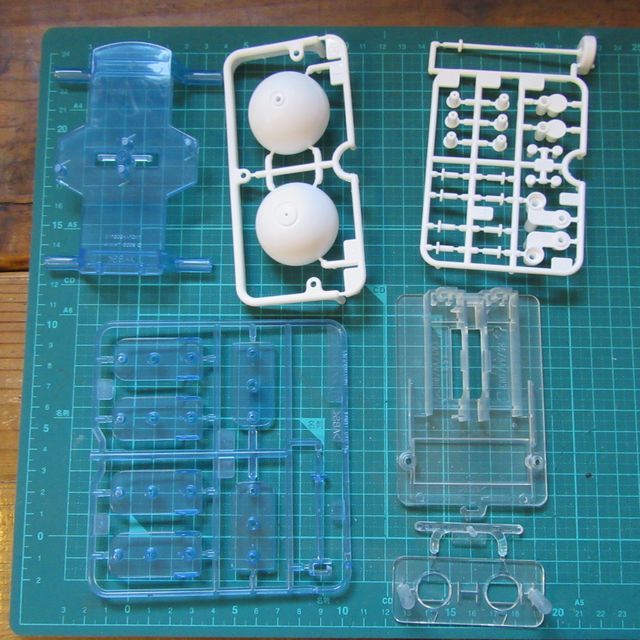
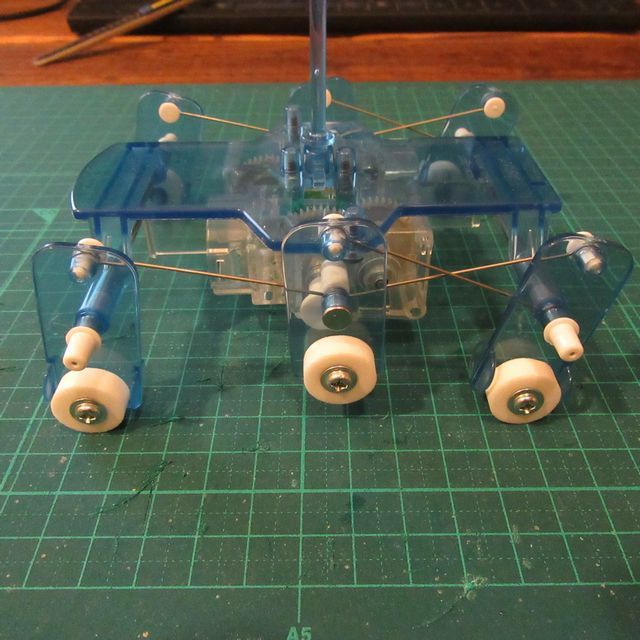
無線ロボットの工作本に取り掛かったのですが、鈴木先生がチョイスしたベース機体が面白いです
虫、といわれればまぁなんとか虫なような。 |


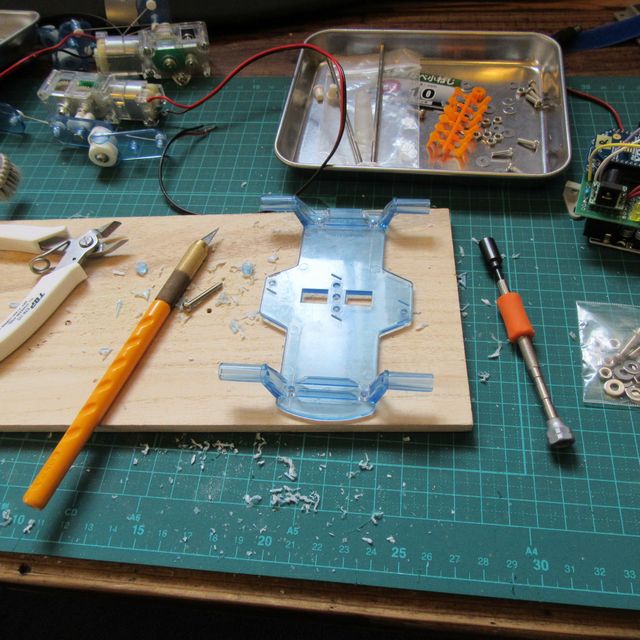
| 有線のリモコンを改造して、基板を取り付けられるように加工 |

インパクトドライバーでは回転数が低いのと、ふとしたはずみでインパクト機能が働いてしまうので
やはり遠からずリューターも購入することになりそうです |
|

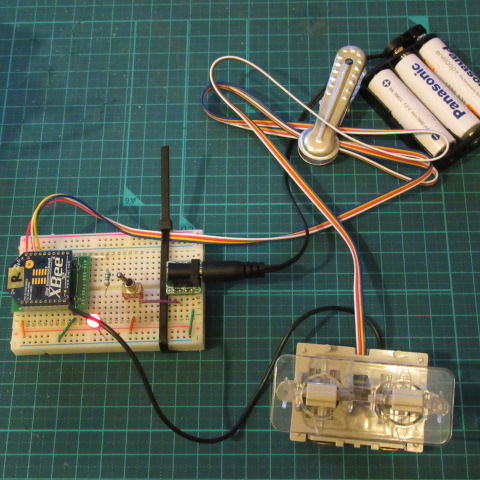
今回使用するXBeeは、KD-02を無線化したときのものとは別バージョンのものです
前回 : XBee S1 PCBアンテナ
今回 : XBee S2 (ZB 2mW, XB24-Z7PIT-004 ) PCBアンテナ
省電力で高性能らしいです (よくわかりませんが・・・)
ZigBee - Wikipedia
IEEE 802.15 - Wikipedia
XBeeSeries – スイッチサイエンス
ボクにもわかるZigBee方式 XBee (ボクにもわかる地上デジタル 地デジ方式編)
http://www.geocities.jp/bokunimowakaru/std-zigbee.html
|
400円くらいの中華デュイーノ
KD-03(電卓)を作った際にまったく動かなかったので、今回はどうなることでしょうか |
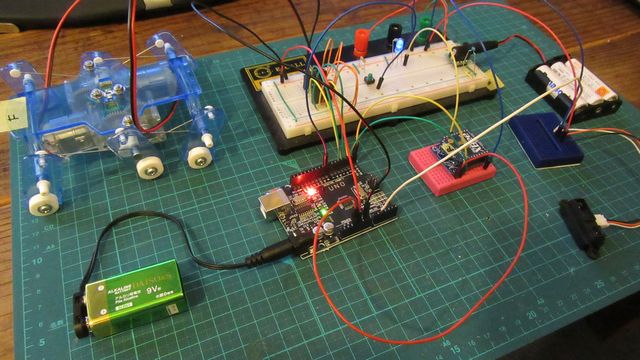
テキストに記載はないものの、ブレッドボード上で接続テスト
ひととおり動いているようです |
|
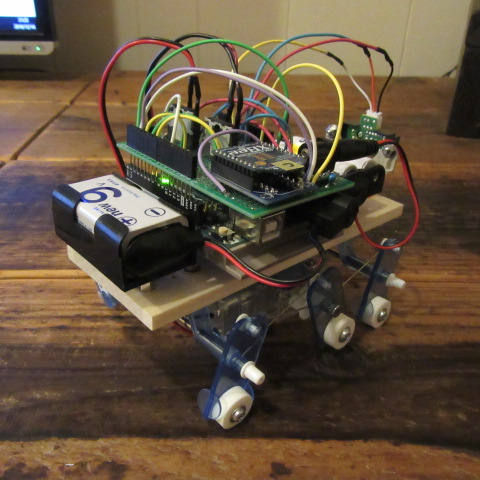
テキストでは普通のユニバーサル基盤に配置しているのですが、
今回もシールド化してしまうことに |
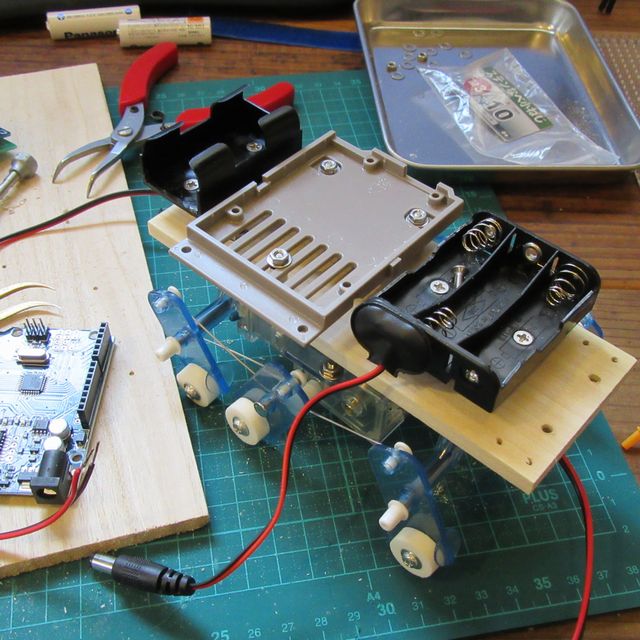
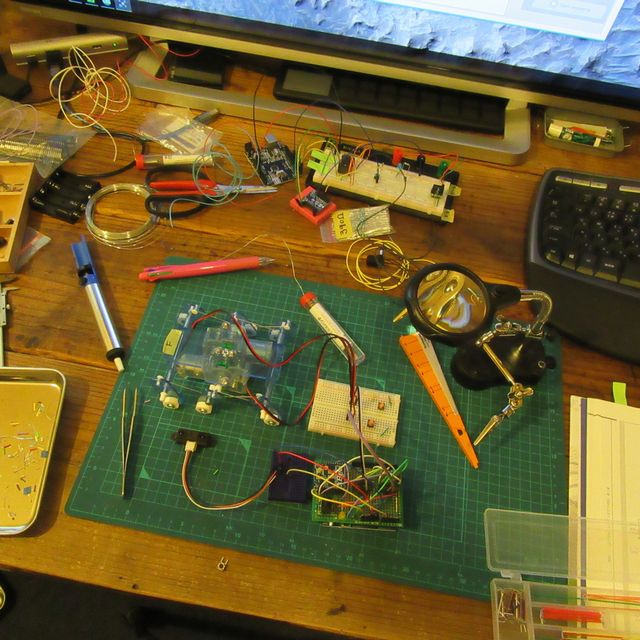
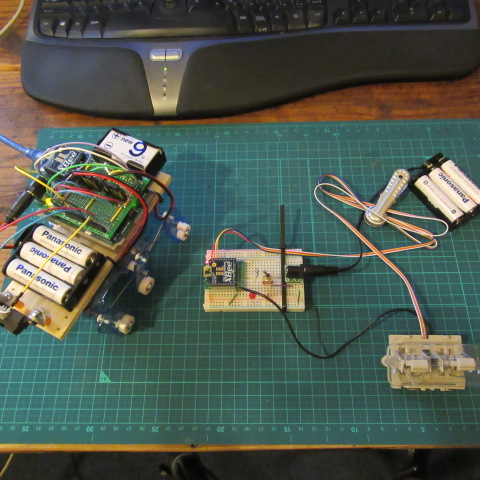
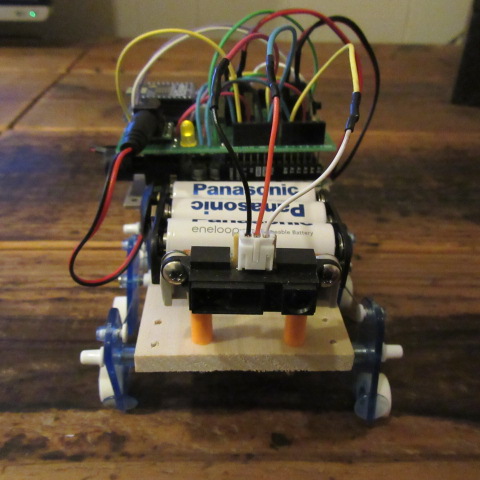
ベースプレートには、タミヤのユニバーサルプレートを使う予定だったのですが
手ごろな木片がパーツ箱の中から発見されたので、これで代用することに
オイルステインでも塗っておけばよかったかな |
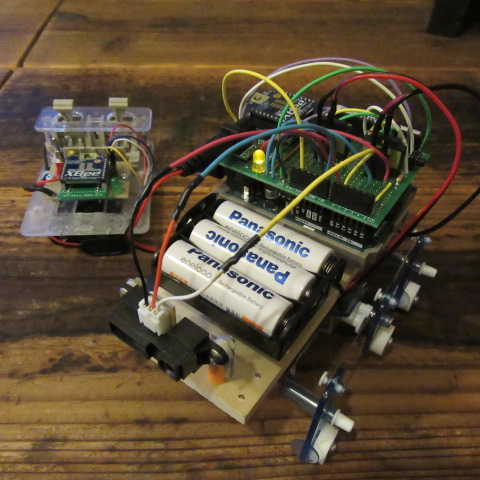
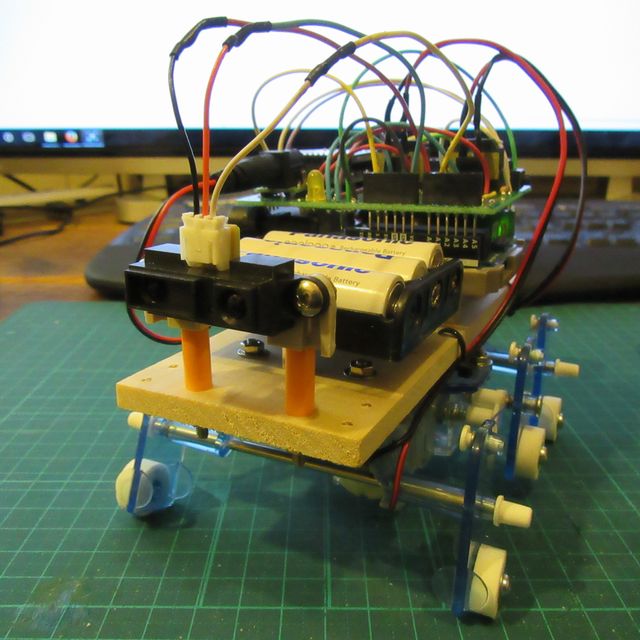
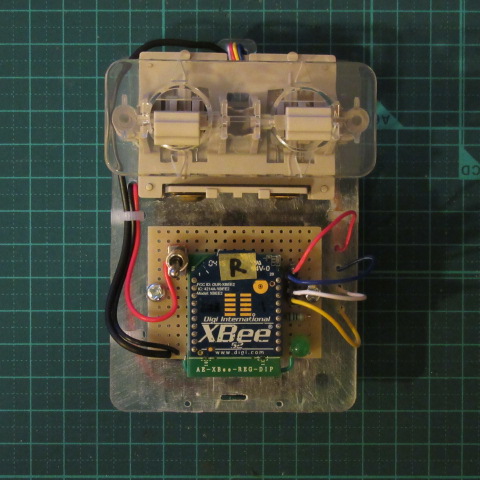
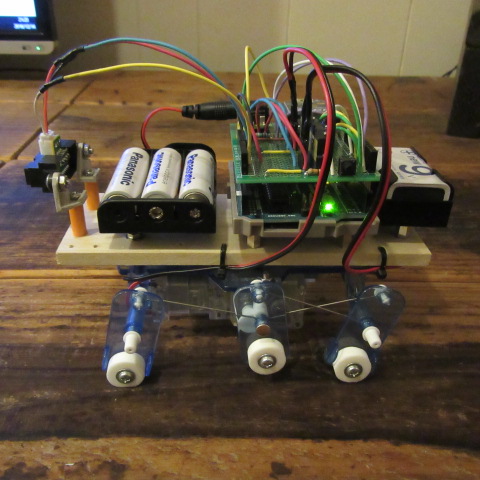
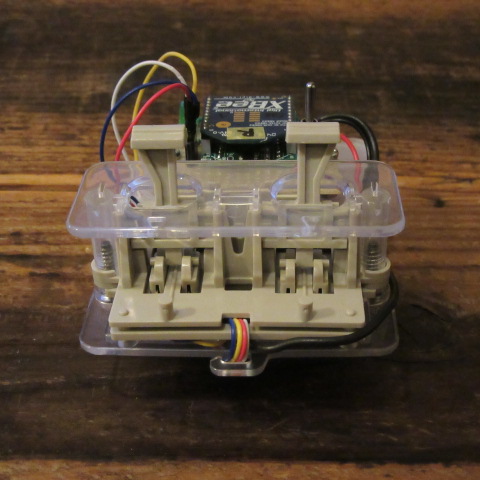
センサーの線は、ベースプレート下に配線しようかと思いましたが、やはり丸出ししておくことに
ちょっと虫(インセクト)っぽくなる気もします |
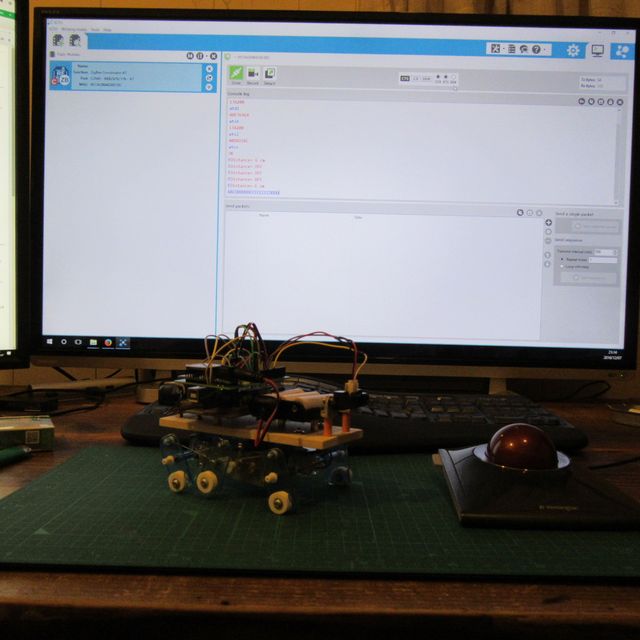
リモコンが出来ていないので、XCTU上から動作テスト
なんとか動いてるっぽいです |
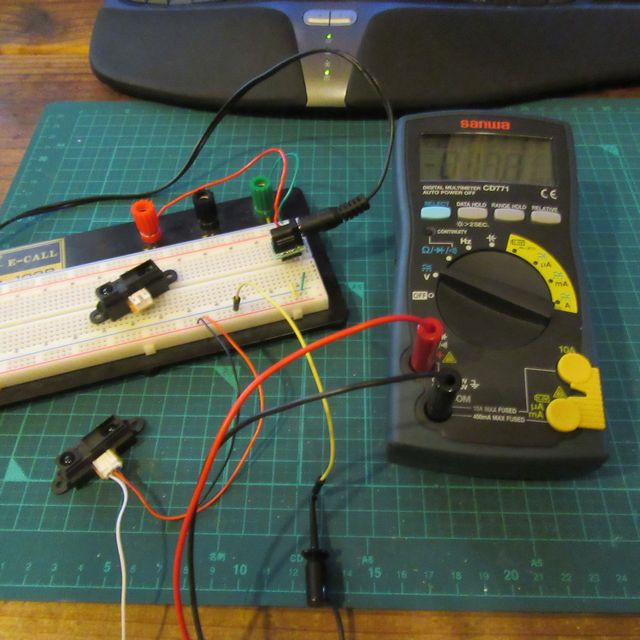
「なんかやけに熱いなぁ」 とは思ってたんですが、距離センサーを二個壊しました
黒い線がプラスのほうだったとは盲点でした |
|
| 1週間ほど間が空いて、やっとこリモコンの制作に取り掛かります |
リモコン回路から無線操作を試みるのですが、これがまたまったく動きません。
なんだかんだやって、結局中華デュイーノを純正UNO R3にしたら動きました。
<追加試験>
ボードをArduino Leonardo に変更してテスト
⇒ 自動走行モードでは動く
⇒ リモコンモードでは動かない
⇒⇒ 通信になんか問題がありそう
ref)
Arduino Leonardo と xBee のトラブル : 林檎愛博士-私は如何にしてMacを愛するようになったか
⇒ コード中の Serial を全て Serial1 に変更したら動きました
|

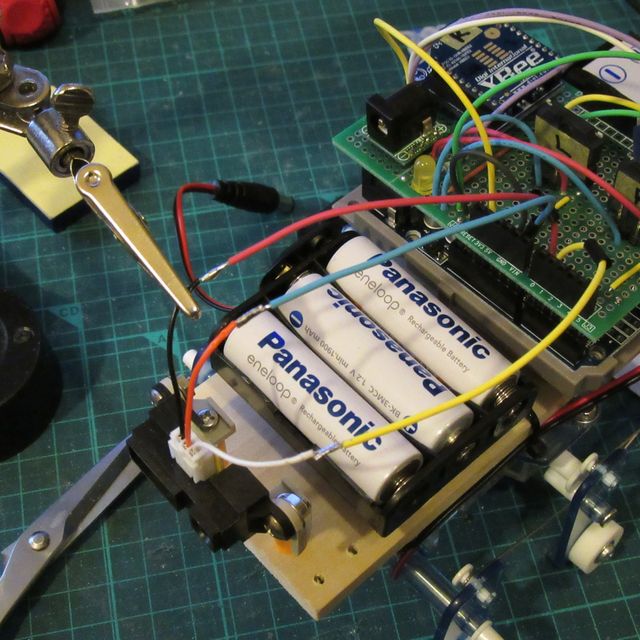
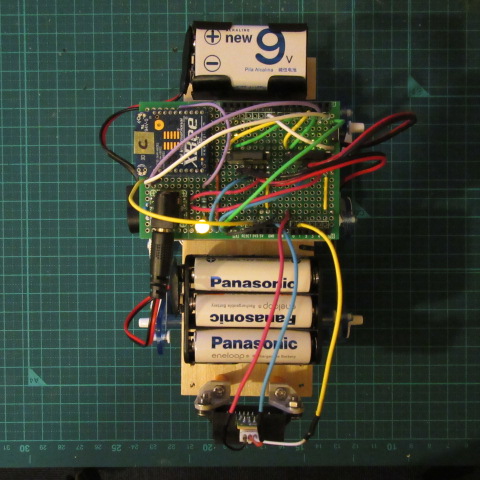
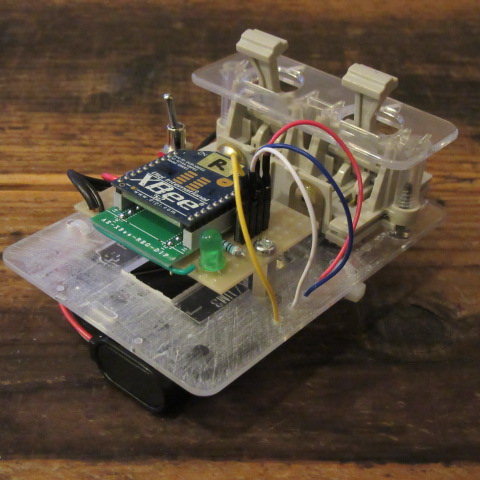
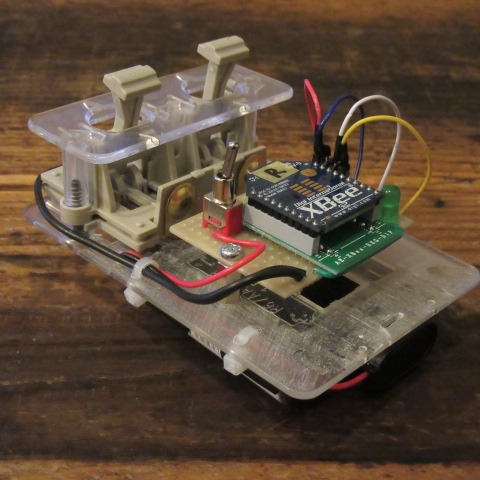
コントローラーを完成させます。
こちらもテキスト内容をすこし変更して部品を配置 |
| XBeeへのI/Oをピン接続にして、トグルスイッチは基板上に配置しました |
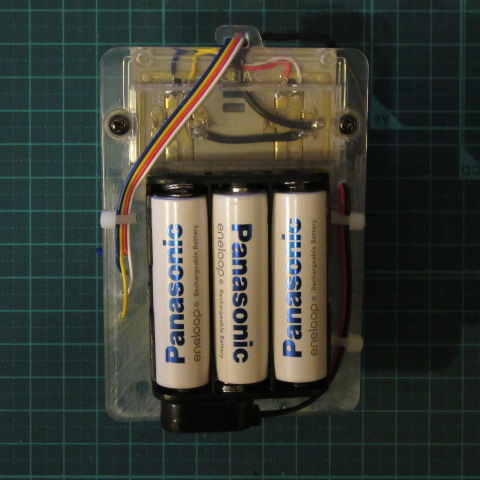
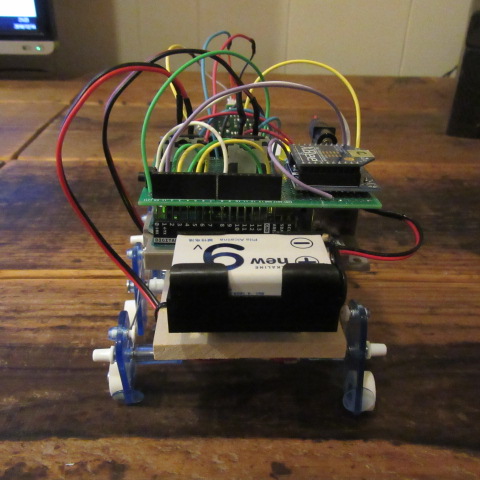
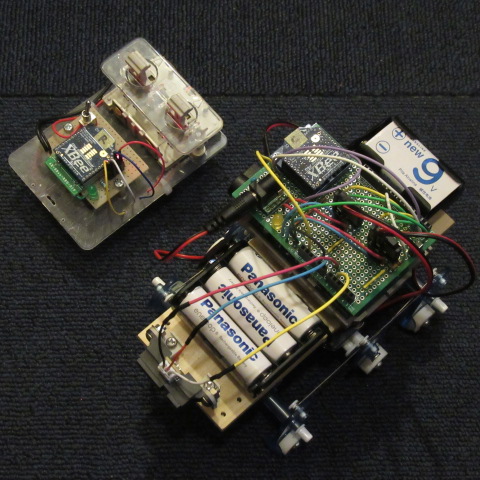
電池は前面ではなく背面に
一個2500円もするXBeeは、やっぱり常に見える位置にあったほうが
ありがたみがあっていいかな、というようなことでこのような配置に。 |
|
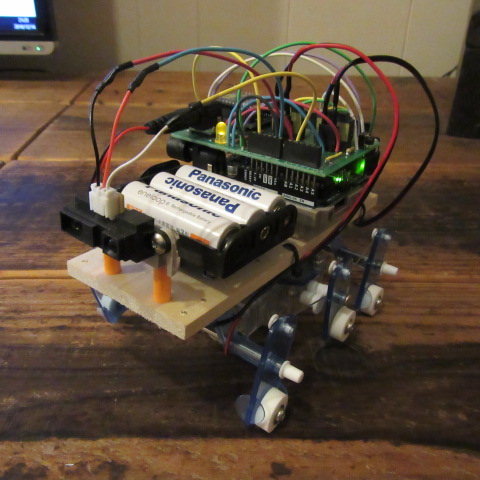
動作テスト
<サンプルコードの変更点>
障害物発見
⇒ 後退 2000ミリ秒から800ミリ秒へ変更
⇒ 旋回 2000ミリ秒から800ミリ秒へ変更
|
|

|
〔雑感〕
とても良いテキストに巡り合えたと思った。
「理解できない部分は飛ばして、ひとまず作る」というやり方で進めたのだけど、
今のところうまく行っているように思う
その分、「じゃあ何でこれ動いたの?」という風に、後からテキストを熟読し、
ノートにまとめている時間のほうが長くなる傾向にある
完全に独学なので、出てきた疑問点について検索しても解決しなかった場合について、
対策を考える必要があると思いました。
最初の工作物である、エステス社のロケットから丸一年が経過。
あまりの理系的知識の無さに、NHK高校講座を受講しつつロボットらしきものをつくれるように
なったので、割と充実した1年だったのかな、などと思いつつ
次作へ続きます。
|
|
|
Back
|